Принцип роботи машини Line-tracker
Вітаю, друже! Ти вже створив свій перший робо-проект "Метеостанція" та виконав практичне завдання зі свторення Led-кубу. Прийшов час ознайомитись конкурсною частиною проектів з робототехніки, а саме з робо-машинами.
Першою машиною, над якою ти почнеш працювати буде Line-tracker! Що ж це за робот? Це класичний робот з моделей конкурсної робототехніки, також є самим поширеним роботом для участі у змаганнях. Line-tracker - це машинка, яка курсує вздовж лінії певного кольору (зазвичай чорного). Конкурсна частина полягає саме в тому, щоб робот пройшов задану відстань за найкоротший час, при цьому не зійшов зі шляху.
При виготовлені таких машин потрібно особливу увагу звертати на габарити транспортного засобу, колеса, маневреність і тд, тобто усе, що може вплинути на швидкість. Оскільки швідкість вимірюється суворо до м.секунд, на неї впливають такі фактрори навіть як форма машини, тобто при роботі над даним проектом необхідно усе продумати заздалегіть ще на етапі розробки та креслень.
Будова типової машини, яка їздить вздовж чорної лінії
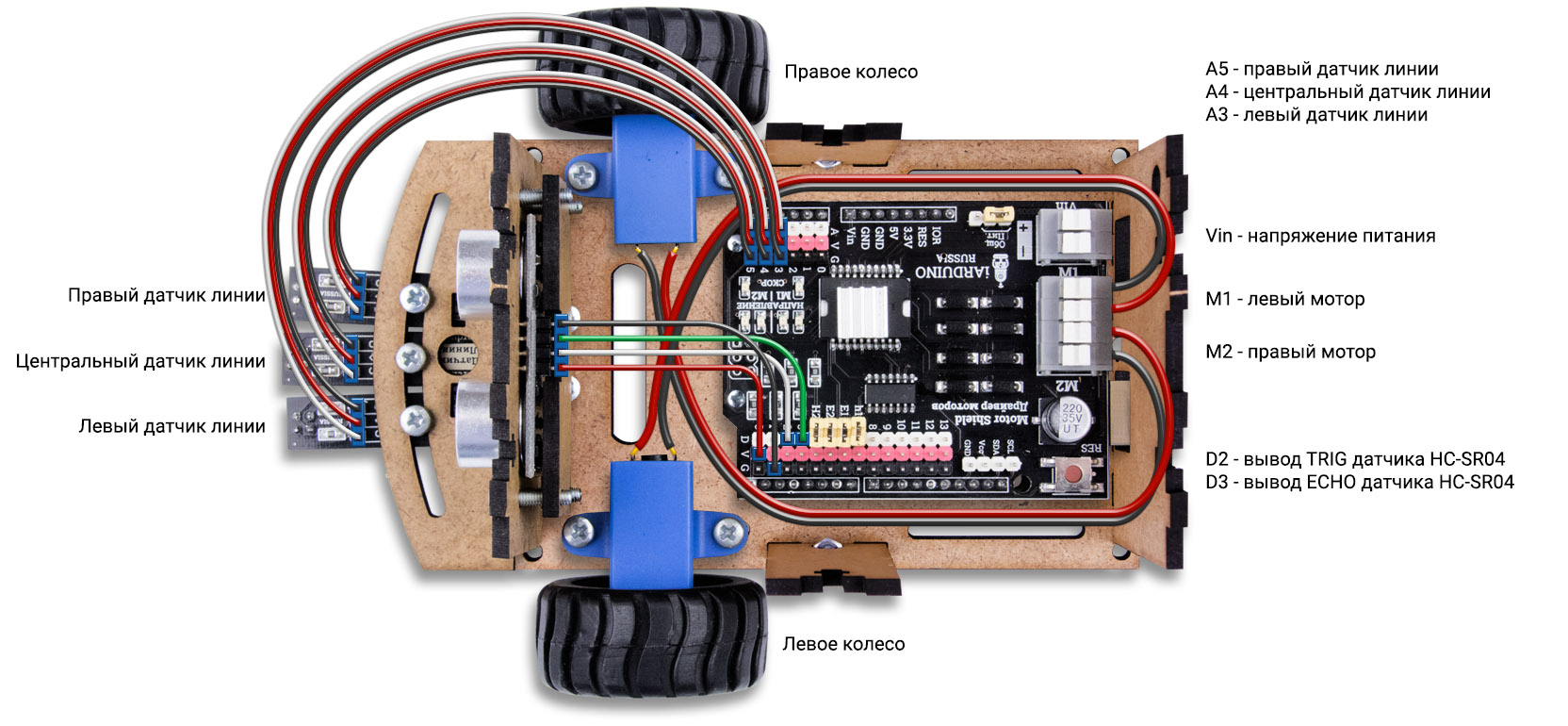
Для роботи такої машини може бути достатньо два датчики. Але є варіації з різною їх кількістю і розміщенням. Усе залежить від потреб і фантазії автора проекта. При цьому сенс залишається незмінним, датчики мають бути запрограмовані на колір лінії і реагувати на зміни якомога швидше.
Алгоритм роботи:
- Якщо центральний датчик знаходиться на лінії, а бічні поза лінією, то машинка їде прямо.
- Якщо лівий датчик знаходиться на лінії, а правий поза лінією, то машинка повертає ліворуч (незалежно від показань центрального датчика ) .
- Якщо правий датчик знаходиться на лінії, а лівий поза лінією, то машинка повертає праворуч (незалежно від показань центрального датчика) .
- Якщо правий та лівий датчики знаходяться на лінії (незалежно від показань центрального датчика ), то такий стан є невизначеним, машинка продовжує попередній рух (прямо або з поворотом) протягом 2 секунд (можна міняти в скетчі). Якщо протягом цього часу стан не зміниться, вона зупиниться.
- Якщо всі три датчики знаходяться поза лінією, такий стан є невизначеним (втрата лінії). Якщо цьому стану передував поворот, машинка продовжить поворот протягом 2 секунд (можна змінювати в скетчі). Якщо протягом цього часу стан не зміниться, вона зупиниться. Якщо цьому стану не передував поворот (машинка їхала прямо і лінія обірвалася), машинка відразу зупиниться.
- Якщо перед машинкою з'явилася перешкода на відстані менше 10 см (можна міняти в скетчі), то машинка зупиниться і продовжить рух, як тільки перешкода зникне.



Комментариев нет:
Отправить комментарий